机器人姿态简介
本文档主要介绍机器人姿态的多种表示方式,你将从本文档了解到以下内容:
- 姿态有哪些常用的表示方法?
- 这些表示方法有哪些特点和应用场景?
- 这些表示方法怎么相互转换?
1. 姿态常用表示方式
1.1 旋转矩阵(Rotation Matrix)
采用一个 $3*3$ 的矩阵来表示旋转,即:
一个坐标系的三个坐标系轴的单位矢量确定一个姿态,我们用这三个单位矢量作为矩阵的列,即旋转矩阵来表示这个坐标系的姿态。
1.2 旋转矢量(Rotation Vector)
采用一个向量来表示旋转,即:
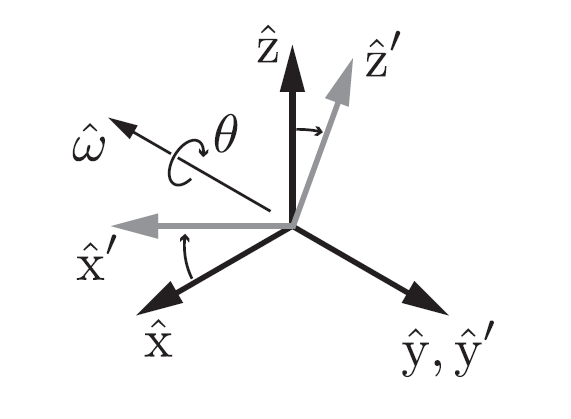
其中: $\hat\omega = \left[ \matrix{\omega _1 \ \omega _2 \ \omega _3}\right]$ , 为旋转轴, $\theta$ 为绕 $\hat \omega $ 旋转的角度。
如下图所示:是一个绕 y 轴旋转 $\theta$ 角的一个示例
1.3 RPY角 (Roll-Pitch-Yaw Angles)
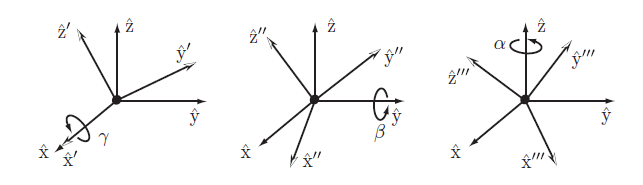
RPY 角采用三个角度绕固定坐标系转动的角度来表示旋转,
- 先绕固定坐标系的 $\hat X$ 轴旋转 $\gamma$ ;
- 再绕固定坐标系的 $\hat Y$ 轴旋转 $\beta$ ;
- 再绕固定坐标系的 $\hat Z$ 轴旋转 $\alpha$ ;
如下图所示:
可以表示为:
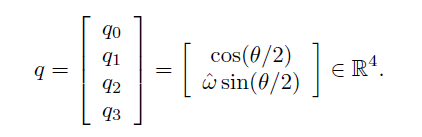
1.4 单位四元数(Unit Quaternions)
单位四元数采用四个数来表示一个旋转,已知一个旋转 $R = Rot(\hat \omega, \theta)$ ,采用四元数可以表示为 :
2. 相互转换
2.1 旋转矢量 和 旋转矩阵
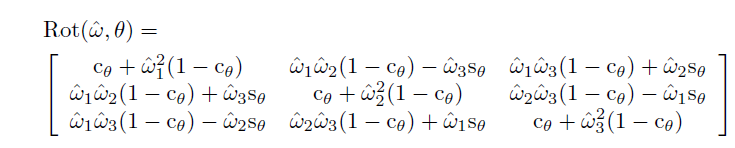
旋转矢量转化到旋转矩阵
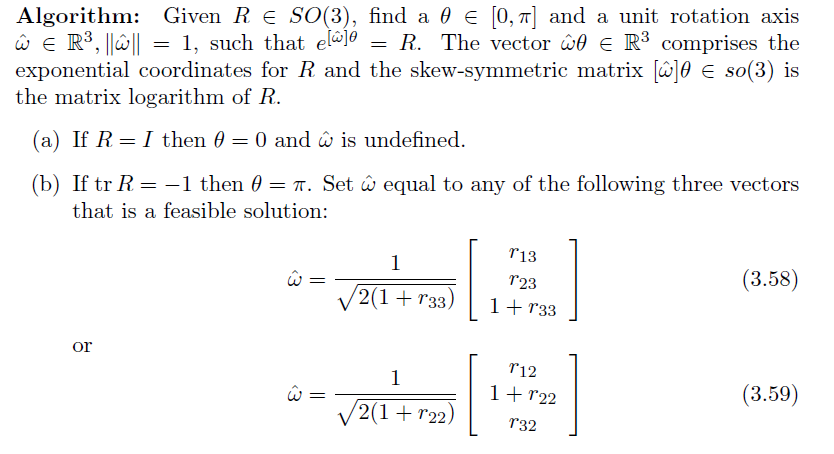
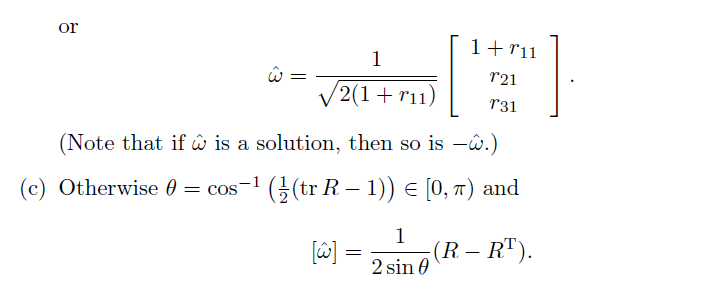
旋转矩阵转换到旋转矢量
2.2 RPY 和 旋转矩阵
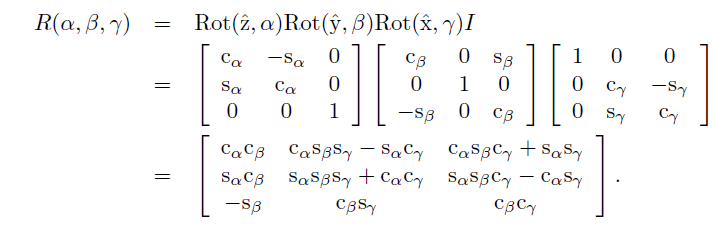
RPY角转换为旋转矩阵
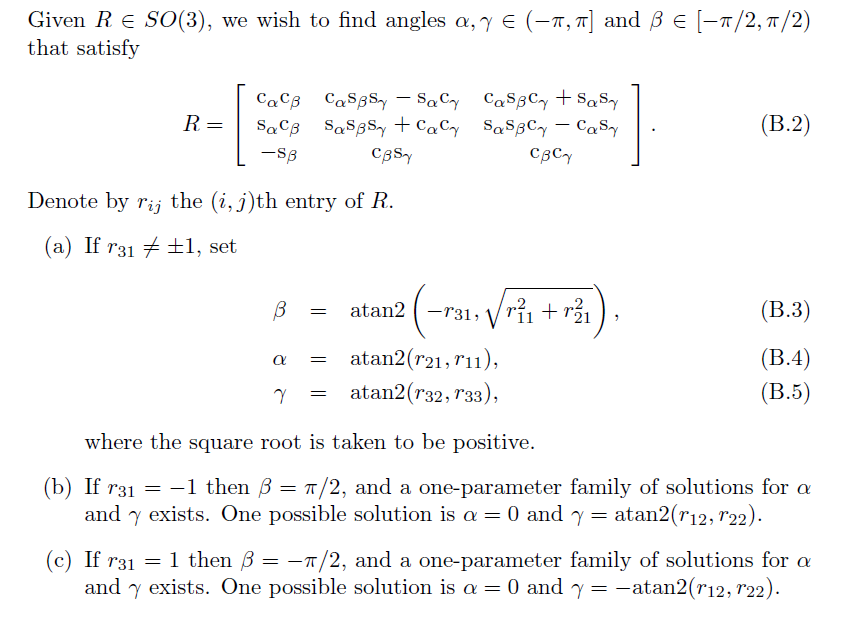
旋转矩阵转换为RPY角
2.3. 单位四元数 和 旋转矩阵
单位四元数转换到旋转矩阵

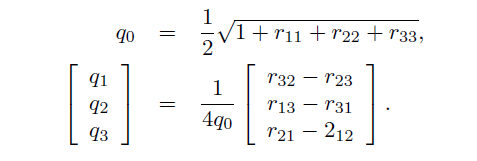
旋转矩阵转换到单位四元数
3. 应用场景
旋转矩阵
- 旋转矩阵是与姿态一一对应,需要 9 个数来表示旋转,只有 3 个变量是独立的,常用于正逆解的运算;
旋转矢量
- 旋转矢量的表示方法非常直观,只需要三个数就能表示旋转,常用于与用户的交互;
- 旋转矩阵转换为旋转矢量时,数值对小角度的旋转敏感(除以$sin\theta$ ) ,且在 $R = I$ 时存在奇异;
RPY 角
RPY 角采用三个角度表示姿态,常用于姿态的显示;
存在万向锁问题,以及奇异问题($\beta = \pm \pi/2$ 时);
如果 $\beta = \pi/2$ ,($- \pi /2$ 同理)
旋转矩阵为:
$\gamma$ 和 $\alpha$ 表示绕同一个轴旋转(-x),存在无数解(奇异),无论怎么改变 $\gamma$ 和 $\alpha$ 的值,只能实现绕 X 轴的旋转(万向锁)。
单位四元数
- 采用单位四元数表示姿态可以避免数值奇异问题;
- 常用于姿态的插值计算;